落锤/摆锤式压力校准系统
落锤/摆锤式压力校准系统
1 功能简介
1.1 塑性测压元件(铜柱/铜球)准动态校准
基于落锤式压力发生装置可以实现铜球、铜柱等塑性测压元件的准动态校准,准动态校准技术可有效地减小静动差。所谓准动态校准,就是用已知峰值且波形与膛压曲线接近的压力脉冲作用于塑性敏感元件上,得出峰压和敏感元件的输出(铜柱是变形量,铜球是压后高)间的对应关系,再据此编出动态压力对照表。由于校准压力源和待测压力有相似的动态特征,可以有效减小塑性测压器件的静动差。
1.2 各类压力传感器的老化处理
准静态校准装置依靠PLC控制系统,准静态校准装置可以自动产生幅值不同的准静态压力载荷。通过向传感器不断施加准静态压力载荷,可以轻松实现传感器老化过程的自动化进行。
1.3 压电式传感系统准静态校准
校准装置依靠准静态压力发生装置准产生2-8ms脉宽的近半正弦信号作为激励信号,可解决压电式压力传感器静态及低频特性不佳而不适用于静态校准的问题,适用于压电式压力传感器的校准。针对不同量程的压力传感器可以选用摆锤/落锤产生激励信号,可以保证激励信号有足够的压力分辨率。摆锤式准静态校准系统适用于小量程(0-10MPa)传感器的校准,而落锤式准静态校准装置适用于大量程(0-1000MPa)传感器的校准。
1.4 压力传感系统的温度特性参数获取
校准装置配备校准温度控制装置,通过将造压油缸组件放置在保温箱中,可以对被校传感器所处环境的温度进行控制。依靠温度特性优秀的压力传感器组成标准压力监测系统,可在不同的环境下对传感器进行校准,从而获取传感器的灵敏度、线性度等工作特性参数随温度的变化。
2 系统构成
2.1 校准系统的组成
校准系统主要由造压油缸、高低温控制系统、落锤式准静态压力发生装置、摆锤式准静态压力发生装置组成。
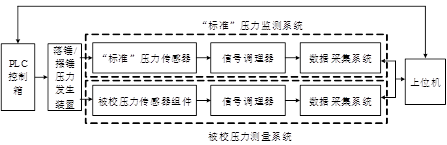
图1 准静态校准系统原理框图
1. 造压油缸
造压油缸是产生激励压力的关键部件,其结构如图 2所示。造压油缸主要包括:油缸本体、精密活塞缸、精密活塞杆、溢流阀等。通过调整系统的参数,如摆锤质量、活塞杆工作面积以及造压油缸的初始容积等可以获得不同脉宽和幅值的半正弦压力信号。
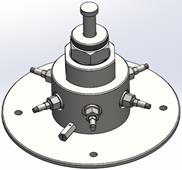
图 2 造压油缸外形示意图
落锤/摆锤式压力发生装置通过锤头锤击活塞杆压缩油缸内部的造压油从而实现传感器的校准。油缸本体上设计有多个标准压力传感器安装孔及被校传感器安装孔,被标传感器通过专门设计的转接件安装到造压油缸上,转接件可用于各类压力传感器的连接。
2. 落锤式压力发生装置
落锤装置主要由以下几部分组成:校准装置框架、造压油缸、重锤组件、提锤组件、托锤组件和防爆机柜等,如图 3所示。改变重锤质量、重锤高度、造压油缸的初始容积及活塞工作面积,可产生用于传感器标定用的各种峰值和脉宽的激励压力信号。

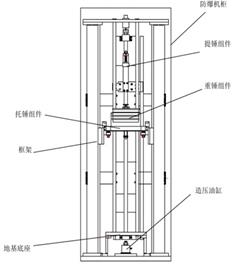
a)落锤装置实物图 b)落锤装置总体结构示意图
图 3落锤装置总体机械结构
落锤式准静态校准装置采用重锤锤击造压油缸活塞杆缠身激励压力。重锤主要由基本锤架和配重盘片构成,通过添加不同质量的配重盘片实现不同的质量要求。重锤结构如图 4所示,主要由基本锤架、锤头、过渡件、配重盘片组合、吸盘扇形导套等构成。

图 4 重锤组件结构
提锤组件主要包括直线定位组件和提锤臂(含电磁起重器),直线定位组件由PLC发出工作指令驱动步进电机带动滚珠丝杠,从而定位挂锤系统及重锤高度。
校零器的主要功能在于确定光栅尺位移行程的零点,以精确定位重锤与活塞工作面之间的高度。每次安装造压油缸后,需在重锤外侧套上校零器,控制重锤缓慢下落直至校零器触碰到活塞杆表面产生接触信号,此时信号被反馈至PLC端,将此刻重锤位置记做光栅尺的相对零位,并在PLC内置程序内将下落高度置为校零器的高度。在此之后重锤上升至安全高度,系统进入试验的待机状态。
托锤系统连接板分别与两侧的无杆气缸活塞(滑台)连接,由连接架连为一体,保证两侧气缸同步运动。托锤组件的主要作用是将重锤提升到电磁起重器可以吸锤的位置和防止二次击锤。当落锤下落击中活塞组件后,通过安装在框架上的重锤感应开关控制气动托锤板快速上升。
落锤液压校准装置采用PLC全自动控制,并配备触摸屏进行操作。控制系统与校准装置本体之间通过专用线缆连接,并预留与上位机的通信接口。控制系统具有提升高度输入、提升高度实时显示、压力和脉宽估算等一系列功能。控制系统的组成如图 5所示,其主要PLC、触摸屏、位置监测传感器和各控制及执行元件。
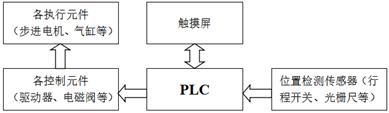
图 5 控制系统的组成框图
3. 摆锤式准静态校准装置
摆锤式准静态校准装置主要依靠摆锤锤头锤击造压油缸活塞杆产生半正弦压力信号。校准装置主要由驱动模块(步进电机组)、执行模块(摆锤-油缸机构)及PLC控制系统三大部分构成。摆锤装置产生的压力幅值为0~10MPa,压力脉宽为2~8ms,适用于小量程压力传感器的准静态校准。校准装置所具有的基本功能主要包括:精确提升摆锤、固定摆锤、摆锤自由下落以及防二次撞击等。
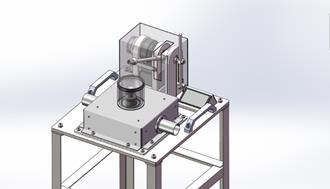
图 6 摆锤式压力发生器
校准装置能够通过PLC控制步进电机提升摆锤到指定位置。依靠相应的传感器可以测出摆锤的提升角度,并反馈至PLC模块,从而精确控制摆锤的提升高度。在摆锤自由下落时,断开摆杆和驱动单元物理连接,应尽可能地减少摆锤的下落阻力,尽满足摆锤和活塞的撞击速度要求。校准装置具有相应的防止二次撞击的装置,可避免反弹后的摆锤再次撞击活塞。
摆锤式压力发生器采用PLC全自动控制,并配备触摸屏进行操作。控制系统与校准装置本体之间通过专用线缆连接,并预留与上位机的通信接口。控制系统具有摆锤提升角度输入、提升角度实时显示等一系列功能。摆锤装置控制系统主要包含控制箱组成,控制箱由HMI触摸屏、PLC可编程控制器、继电器、开关电源以及步进电机,其具体组成如图 7所示。
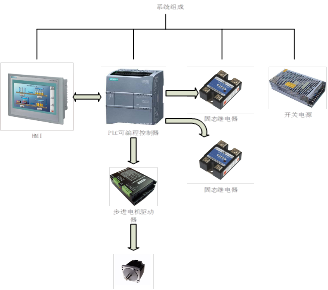
图 7 摆锤装置控制系统组成
2.2 压力监测系统
1. 压力监测系统组成
摆锤式标准压力传感器针对常用量程的冲击波压力传感器(50psi(0.345MPa)、100psi(0.69MPa)、200psi(1.38MPa)、500psi(3.45MPa)、1000psi(6.9MPa)),冲击波压力校准系统选用Kistler公司量程为25MPa的601CAA压电式压力传感器。601CAA压电式压力传感器如图4.1所示,其主要技术指标如表4.1所列。

图 8 601CAA压力传感器实物图
表1 601CAA传感器技术参数
|
型号 |
601CAA |
|
量程 |
25MPa |
|
过载 |
30MPa |
|
线性度与迟滞 |
≤±0.1%FSO |
|
工作温度 |
-196~350℃ |
|
固有频率 |
>215kHz |
为了提高0~1MPa低量程段的压力监测精度,本项目拟采取以下措施:
1)在0~1MPa压力范围内单独进行量值传递,采用多轮循环校准的方法,建立标准压力监测系统在低量程段内的工作方程;
2)通过增大电荷放大器的放大倍数,提高标准传感器601CAA的压力分辨率;
3)借助于电荷校正器对电荷放大器进行校正,以减小调理器的电荷漂移。
除了在10~25MPa时选用601CAA压力传感器,落锤式标准压力传感器选用Kistler公司的1000MPa的6213BK型压力传感器用作压力量程段25~700MPa的准静态校准。6213BK压力传感器如图4.2所示,其主要技术指标如表4.2所列。

图 9 压力传感器实物图
表2 6213BK压力传感器技术参数
|
型号 |
6213BK |
|
量程 |
1000MPa |
|
过载 |
1100MPa |
|
线性度 |
≤±0.3%FSO |
|
工作温度 |
-50~200℃ |
|
固有频率 |
>150kHz |
压力传感器适配的是Kistler公司5018A电荷放大器,该型号电荷放大器实物如图4.3所示,其主要技术指标如表4.3所列。

图 10 5018A型电荷放大器实物图
表3 5018A型电荷放大器技术参数
|
型号 |
5018A |
|
测量范围 |
±2~2200000pC |
|
测量误差 |
<0.3% |
|
工作带宽 |
0~200kHz |
|
最大输出电压 |
±10V |
2. 不确定度分析
1)传感器引入的不确定度分析
采用kistler公司的601CAA和6213BK传感器作为标准传感器,由601CAA传感器说明书可得传感器的线性度、重复性、迟滞分别为 ,
, ,
, ,其中线性度、重复性、迟滞性按均匀分布计算,则601CAA引入的不确定度为
,其中线性度、重复性、迟滞性按均匀分布计算,则601CAA引入的不确定度为 。由6213BK传感器说明书可得传感器的线性度、重复性、迟滞分别为
。由6213BK传感器说明书可得传感器的线性度、重复性、迟滞分别为 ,
, ,
, ,因此6213BK传感器引入的不确定度为
,因此6213BK传感器引入的不确定度为 。
。
2)标准压力监测系统不确定度分析
除了传感器本身引入的不确定度外,系统的不确定度还由以下分量组成。调理器的增益误差及漂移误差引起的不确定度可记为 、
、 ,有:
,有:
 (4.1)
(4.1)
式中、 可采用B类不确定度进行计算,按均匀分布的形式计算,可从相应说明书中找到对应增益误差 及漂移误差
及漂移误差 ,则有
,则有

 (4.2)
(4.2)
数据采集系统线性、增益及量化引起的不确定度为:
 (4.3)
(4.3)
压力基准源不确定度 取实际采用的活塞式压力机的不确定度,由计量部门提供的校准证书可得扩展不确定度为0.02%(k=3),则
取实际采用的活塞式压力机的不确定度,由计量部门提供的校准证书可得扩展不确定度为0.02%(k=3),则
 (4.4)
(4.4)
根据以往的经验数据电测系统实际工况及环境引起的电噪声有 。据相关资料给定的造压油缸压力不一致性
。据相关资料给定的造压油缸压力不一致性 可取0.2%综上,由单通道引入的标准压力监测系统压力监测不确定度为
可取0.2%综上,由单通道引入的标准压力监测系统压力监测不确定度为
 (4.5)
(4.5)
两路压力测量系统构成标准压力监测系统的标准不确定度为
 (4.6)
(4.6)
其扩展不确定度U(k=2)为
 (4.7)
(4.7)
四路压力测量系统构成标准压力监测系统的标准不确定度为
 (4.6)
(4.6)
其扩展不确定度U(k=2)为
 (4.7)
(4.7)
2.3 量传途径
量值传递是测量系统校准的基础,测量结果具有“溯源性”,是量值传递准确一致的前提。校准系统采用的直接比对式校准方法传递路线较短,精度较高。依照国家计量等级链逐级进行量值传递,保证被测对象的量值准确和统一。具体量传途径如图所示。
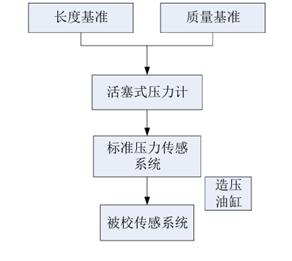
图 11量传途径图
准静态校准的量值传递分为三步:首先,通过质量和长度基准传递到活塞式压力计;其次,经过静态标定,由活塞式压力计将标准压力传递至标准压力传感系统;最后,经过准静态校准,经造压油缸由标准压力监测系统传递至被校压力传感系统。
3 落锤/摆锤式准静态校准系统
3.1 主要技术指标
l 压力校准范围:摆锤式准静态校准装置:0-10MPa
落锤式准静态校准装置0-1000MPa;
l 压力波形:近似半正弦形
l 温度控制范围:-40-135℃
l 准静态压力脉宽:2-8ms(可调)
l 监测系统监测不确定度。
|
|
0-25MPa |
0-1000MPa |
|
双标准传感器 |
1.50% |
1.53% |
|
四标准传感器 |
1.06% |
1.08% |
3.2 主要功能及控制方式
1. 准静态/准动态校准功能
准静态/准动态校准采用PLC控制落锤/摆锤校准装置进行。校准过程可通过控制面板控制校准过程中提锤高度等相关参数。校准数据依靠采集系统传输给上位机。通过数据处理软件可计算得出被校传感器的灵敏度、线性度等工作特性参数并生成实验报告。除此之外,软件还可以根据实际需求进行界面及功能上的定制。
2. 传感器老化功能
传感器老化过程通过PLC控制器控制落锤/摆锤准静态压力发生装置不断向传感器施加不同幅值的压力载荷实现,老化过程可以在控制装置的控制下自动进行。老化时间施加压力等相关参数可以通过控制面板进行设计。
3. 压力传感系统高低温校准功能
该功能由准静态校准系统与高低温环境控制系统配合实现。通过高低温度控制箱可以控制压缩机或加热器将造压油缸的保温箱温度控制到设定值。在保温指定时间后,采用准静态校准系统可以对处于指定环境温度的传感器进行校准,进而获得不同温度下的传感器工作特性参数。
4 典型应用例
4.1 数据处理方法
由于摆锤及落锤的状态控制的原因,很难保证设定同样的摆角及落高每次可以打出同样的压力峰值。导致摆锤装置在多次校准中难以准确实现某个特定压力值,采用静态特性求取方法并不适用于准静态校准。为给出准静态校准被校传感系统的工作特性参数(包括灵敏度、非线性度以及重复性)求取准则,开展准静态校准数据处理方法研究。假设第i轮第j个标定点的“标准”压力为 ,对应被校系统的 输出电压为
,对应被校系统的 输出电压为 ,i=1~m,m为轮数,j=1~n,n为标定点数。按最小二乘原则对第i轮校准数据线性拟合可得该轮的参考特性方程为:
,i=1~m,m为轮数,j=1~n,n为标定点数。按最小二乘原则对第i轮校准数据线性拟合可得该轮的参考特性方程为:
|
|
|
(1) |

式中, 为标准压力,
为标准压力, 为对应的输出电压,
为对应的输出电压, 为第i轮工作曲线的偏置,
为第i轮工作曲线的偏置, 为第i轮工作曲线的斜率。在传感器量程范围内由大到小均匀地取n个理想“标准”压力点
为第i轮工作曲线的斜率。在传感器量程范围内由大到小均匀地取n个理想“标准”压力点 (k=1,2,…,n),将代入第i轮参考特性方程,得对应的预测电压值
(k=1,2,…,n),将代入第i轮参考特性方程,得对应的预测电压值 。将m轮的预测电压值做算术平均,可得预测电压平均值为
。将m轮的预测电压值做算术平均,可得预测电压平均值为 ,对n组()最小二乘拟合,得被校系统的工作特性方程为:
,对n组()最小二乘拟合,得被校系统的工作特性方程为:
|
|
|
(2) |

(a) 灵敏度
由工作特性方程可知,式中b为被校系统的偏置,单位为V;s为被校系统的灵敏度,单位为V/MPa。
(b) 非线性
非线性是系统的实际输入输出特性曲线对于理想线性输入输出特性的接近或偏离程度,非线性 按式(3)计算:
按式(3)计算:
|
|
|
(3) |
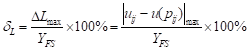
式中, 为残差最大值,
为残差最大值, 为被校系统满量程输出,
为被校系统满量程输出, 是将第i轮第j个标定点的标准压力代入工作特性方程(2)得到的预测电压值。
是将第i轮第j个标定点的标准压力代入工作特性方程(2)得到的预测电压值。
(c) 重复性
重复性是指标定值的分散性,是一种随机误差,可根据标准偏差来计算重复性,重复性 按式(4)计算:
按式(4)计算:
|
|
|
(4) |
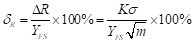
式中 为标准偏差,K为置信因子,各标定点的标准偏差可用贝塞尔公式计算:
为标准偏差,K为置信因子,各标定点的标准偏差可用贝塞尔公式计算:
|
|
|
(5) |

式中, 为第i轮的剩余标准偏差,描述了该轮被校系统的电压输出相对于该轮参考特性方程的偏离程度:
为第i轮的剩余标准偏差,描述了该轮被校系统的电压输出相对于该轮参考特性方程的偏离程度:
|
|
|
(6) |
式中,q为回归方程的待定参数个数,此处q=2。
标准偏差为:
|
|
|
(7) |

4.2 校准应用例
以200psi量程的IEPE反射压传感器为例,进行准静态校准试验,5轮校准结果如表4所列。
表4 传感器的校准结果
|
轮次 |
测量 系统 |
标定点1 |
标定点2 |
标定点3 |
标定点4 |
标定点5 |
标定点6 |
标定点7 |
标定点8 |
标定点9 |
标定点10 |
|
1 |
标准压力/MPa |
0.096 |
0.203 |
0.312 |
0.418 |
0.503 |
0.585 |
0.721 |
0.834 |
0.918 |
1.034 |
|
被较电压/V |
0.418 |
0.851 |
1.297 |
1.710 |
2.075 |
2.436 |
2.962 |
3.428 |
3.764 |
4.224 |
|
|
2 |
标准压力/MPa |
1.016 |
0.913 |
0.788 |
0.702 |
0.575 |
0.487 |
0.407 |
0.292 |
0.215 |
0.089 |
|
被较电压/V |
4.128 |
3.725 |
3.235 |
2.874 |
2.371 |
2.006 |
1.678 |
1.219 |
0.904 |
0.400 |
|
|
3 |
标准压力/MPa |
0.112 |
0.208 |
0.292 |
0.381 |
0.507 |
0.595 |
0.708 |
0.800 |
0.889 |
1.051 |
|
被较电压/V |
0.473 |
0.840 |
1.208 |
1.574 |
2.080 |
2.481 |
2.898 |
3.254 |
3.634 |
4.285 |
|
|
4 |
标准压力/MPa |
1.043 |
0.921 |
0.814 |
0.697 |
0.587 |
0.488 |
0.413 |
0.305 |
0.200 |
0.101 |
|
被较电压/V |
4.248 |
3.765 |
3.332 |
2.859 |
2.437 |
2.014 |
1.707 |
1.274 |
0.838 |
0.449 |
|
|
5 |
标准压力/MPa |
0.098 |
0.200 |
0.305 |
0.403 |
0.490 |
0.590 |
0.708 |
0.808 |
0.904 |
0.994 |
|
被较电压/V |
0.452 |
0.832 |
1.286 |
1.710 |
2.031 |
2.433 |
2.909 |
3.321 |
3.698 |
4.045 |
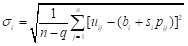
第1轮最低压力点和最高压力点的校准波形如图12所示。
|
|
|
|
(a) 最低压力点 |
(b) 最高压力点 |
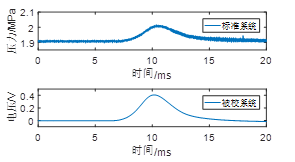
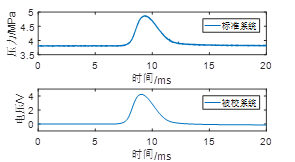
图12 第1轮典型校准曲线
对每轮数据进行最小二乘线性回归,得每轮参考特性方程如图13及表5所示。
图13 冲击波压力传感器5轮参考特性曲线
表5 每轮参考特性方程、相关系数及剩余标准偏差
|
轮数 |
参考特性曲线 |
相关系数 |
剩余标准偏差/V |
|
1 |
|
1.000 |
0.013 |
|
2 |
|
1.000 |
0.008 |
|
3 |
|
1.000 |
0.019 |
|
4 |
|
1.000 |
0.010 |
|
5 |
|
1.000 |
0.016 |





按灵敏度计算方法,代入表4、表5数据,可得传感器的工作特性方程为: 。灵敏度为4.050V/MPa。非线性按式(3)计算为0.83%,重复性按式(4)计算为0.59%,取k=2。
。灵敏度为4.050V/MPa。非线性按式(3)计算为0.83%,重复性按式(4)计算为0.59%,取k=2。
 苏公网安备32010402000796号
苏公网安备32010402000796号

